MS in Robotics and Autonomous Systems
(2024–2026)
Arizona State University,AZ, USA
What Drives Me
I thrive at the intersection of autonomy and intelligence, with a passion for building robots that learn and adapt in the real world.
B.Tech in Mechanical Engineering
(2019–2023)
Indian Institute of Technology Tirupati, India
Experience

Graduate Service Assistant
- Provide instructional support for Numerical Methods for Engineers by assisting in recitations, labs, and in-class activities, ensuring students gain a stronger grasp of computational problem-solving techniques.
- Grade homework, quizzes, and exams while offering constructive feedback to enhance student understanding of numerical analysis and its engineering applications.
- Support course delivery through preparation of assignments, solutions, and exam materials, while addressing student inquiries via email and Canvas.
Graduate research aide
- I assist Dr. Saurav Kumar in UAV-based hyperspectral data collection and analysis of cotton, canola, and soil samples across Arizona as part of his WaterDMD Lab's agricultural monitoring initiatives.
- Developed two STELLA prototypes—portable, 3D-printed multispectral sensing devices—for monitoring water quality parameters such as algal growth, nitrogen, phosphorus, and microplastics under the NASA Landsat initiative.
- Involved in creating ML models for Land-Cover and Land Use Change (LCLUC) data in the Rio Grande Basin watershed.

Mechanical Research Intern
- Worked under the supervision of Mr. Tom Thampy at Central Manufacturing Technology Institute, Bengaluru.
- Designed a hydraulic system apparatus for testing the fuel line replacement unit to heat Jet A1 fuel beyond its autoignition point for fuel supply at 270 degrees Celsius.
- Created various system configurations in SolidWorks and performed CFD analysis on Ansys Fluent to understand the systems' temperature and pressure distributions.
Skills
Robotics & Control
Software & AI
Design & Simulation
Analysis & Creative
Projects

Model free framework for Fault Detection and identification
In this project, we developed a model-free neural network-based fault detection and identification (FDI) framework for safety-critical autonomous systems. Unlike traditional residual-based methods that require precise system models, our approach leverages a switching mechanism and neural networks to detect and identify actuator faults directly from system inputs and outputs. We implemented this framework on Crazyflie quadcopter hardware, validating its effectiveness in maintaining safe altitude and control stability during induced motor failures.

Depth Inference for Unstructured Multi-View Stereo using R-MVSNet
In this project, we developed a convolutional GRU-based cost volume regularization function based on R-MVSNet for efficient multi-view depth inference and benchmarked it against MVSNet on DTU, achieving improved accuracy, F-score, and 40% faster inference. We also created an end-to-end training and evaluation pipeline with statistical and visual perfomance analysis.

Vision-Based Mini Drone Precision Landing on a Moving Platform
In this project, I programmed a Parrot Mambo drone to autonomously land on a moving line-following robot using a Simulink-based vision and control system. A green-colored landing pad was detected via real-time image processing, triggering a stateflow-guided descent. The drone successfully synchronized with the robot’s motion using X-Y position prediction, achieving accurate landings at 1.1 m hover height with <0.2 m final error margin.

Modular 4-DOF Robotic Arm with Manual and Scalable Control
We designed and fabricated a 4-DOF robotic arm using Arduino, PCA9685 servo driver, and 3D-printed components for lightweight automation. Integrated potentiometer and button-based controls for real-time object manipulation using multi-servo PWM control. Developed a modular prototype with scalability for wireless control, vision integration, and expansion to 6-DOF.
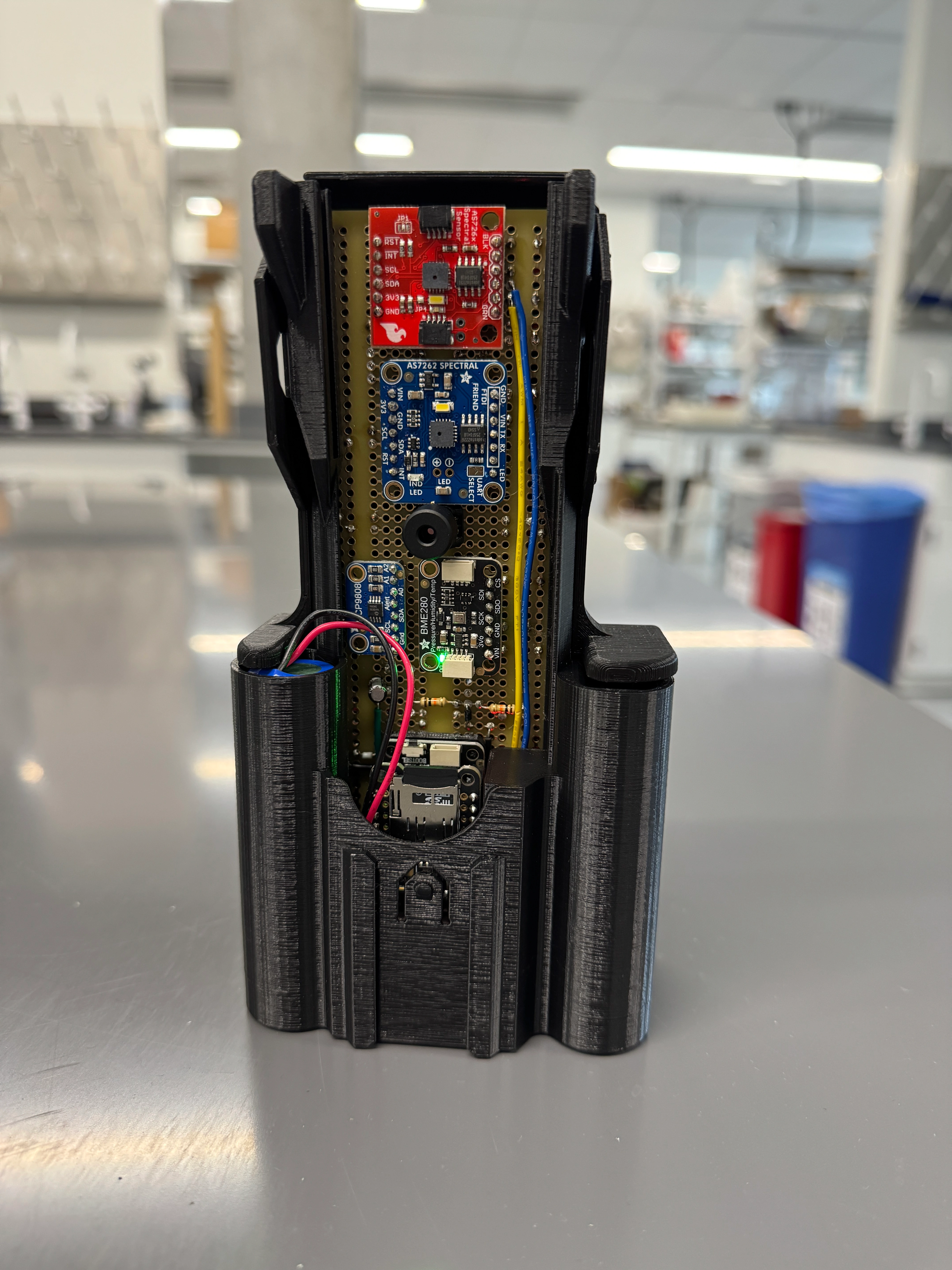
STELLA: Portable remote sensing device for water quality monitoring
Developed three functional prototypes of STELLA, a low-cost, handheld remote sensing device designed under NASA’s Landsat-inspired initiative. Each prototype integrates multispectral sensors and 3D-printed enclosures to support environmental monitoring in field conditions. The devices are used to assess water quality parameters-such as algal blooms, nitrogen (N), phosphorus (P), and potential microplastic presence—through spectral reflectance analysis, aiding in scalable, citizen science-driven environmental observation and agricultural management.

Multi robot swarm for search and rescue in disaster zones
Designed and simulated a decentralized multi-robot swarm system in MATLAB to autonomously search and navigate dynamic disaster zones. The swarm uses Voronoi-based area partitioning, repulsive field navigation for hazard avoidance, and energy-aware planning to maximize coverage while conserving battery life. The scalable system demonstrated over 95% coverage and adaptive real-time responses to expanding hazards, making it ideal for search and rescue, environmental monitoring, and exploration missions.
Dynamic Modeling and Control of a Multi - Prismatic Robotics Arm
Developed a MATLAB-based multi-prismatic robotic system with indirect force control using compliance and impedance strategies. Implemented governing equations for dynamic analysis and built an interactive GUI to visualize joint states, end-effector forces, and enable real-time parameter tuning.

Remote Programming Pluto 1.2 Nano Drone
Built a Python wrapper for the Pluto Nano Drone, enabling control of pitch, roll, take-off, and landing via socket communication using MSP (MultiWii Serial Protocol), without needing a mobile app. Integrated ArUco marker-based localization with a PID controller to enable autonomous hovering and navigation along user-defined paths. Developed as part of the 'Drona Aviation Pluto Drone Swarm Challenge' for Inter-IIT Tech Meet 11.0.
Coursework & Certifications
Graduate Coursework
(Arizona State University, USA)
Spring 2025
- Perception in Robotics
- Robotics Systems II (Aerial Robotics)
Fall 2024
- Advanced System Modelling, Dynamics and Control
- Multi Robot Systems
Spring 2024
- Modelling and Control of Robots
- Linear Algebra
Undergraduate & Certifications
(IIT Tirupati & Online)
2019 - 2023
- Fluid Mechanics
- Kinematics of Machinery
- Manufacturing Technology
- Control Systems
- Finite Element Methods
- Mechatronics
Certifications
- Machine Learning & Data Science A-Z: Python (Udemy)
- Fundamentals of Artificial Intelligence (IIT Guwathi, NPTEL)
Photography



